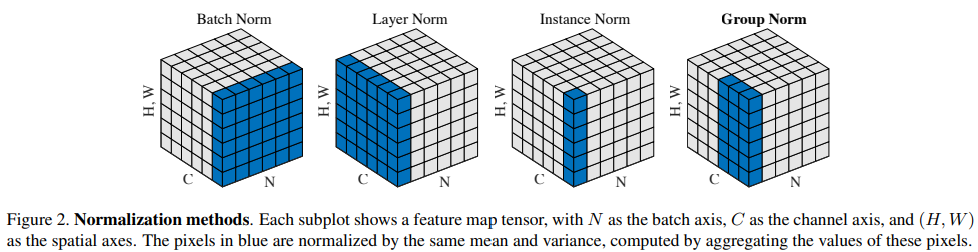
我对深度学习中用到的几种 Normalization 的原理一直了解得不是很清晰,只有个模糊的概念。网上有很多文章介绍相关内容,但我觉得写的都不好,都是模模糊糊的套话,并没有真正深入解释,我们都知道要求均值求标准差,但具体是在哪些维度求呢,并没有讲清楚。很多人喜欢用何恺明在 Group Normalization 中作的一张图(如下),但这个图其实不好看懂,尤其对于本来就不甚清楚的人(就是我)来说。为了清楚这些 Normalization 的原理,我看了一下它们的实现代码,并根据代码自己画了一些示意图,还自己写了简单的实现代码与 PyTorch 中的 API 对比来验证我的理解的正确性。
本文只介绍了三种 Normalization: Batch Normalization, Layer Normalization, Group Normalization,还有一个 Instance Normalization 没有介绍,因为这个主要用在图像迁移里,对于大部分场合来说并不常用,所以我暂时也没打算去深入了解。
1. Batch Normalization
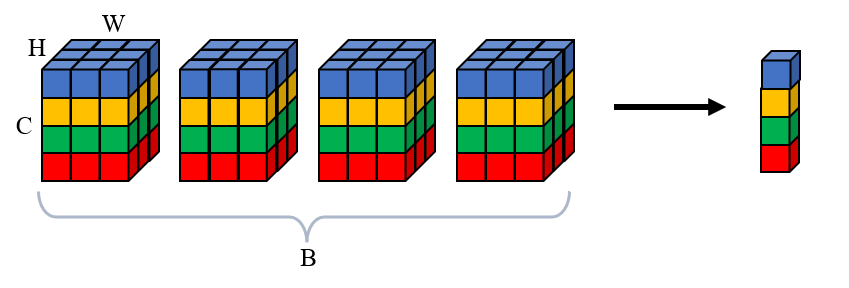
Batch Normalization 是沿通道维度计算均值和标准差,沿通道维度是说,把当前 batch 里每个样本这个通道上的所有值放在一块计算均值和标准差。注意对于 4-D 或者 3-D 的 Tensor 来说,对于一个样本,每个通道上的数目并不仅仅是 1,比如 4-D 的 Tensor,一个通道上有 $H \times W$ 个 element,并不是一个 batch 里样本的同一通道上的每个位置都计算这个位置的均值和标准差,而是把这个通道上的所有 element 放在一起看。
下面是一个 4-D Tensor with shape $(B, C, H, W)$ 计算均值和标准差的示意图,计算得到的均值和方差的形状是 $(C,)$,再广播成输入的形状进行计算。
为了保证非线性,还要再 scale and shift,用两个参数 $\gamma$ 和 $\beta$,二者的形状是 $(C,)$
计算方差(或标准差)是有偏的,即除以 $B$ 而不是 $B-1$
对于不同形状的输入,计算规则如下:
一个 batch 的图片输入 $X \in \mathbb{R}^{B \times C \times H \times W}$, $\gamma \in \mathbb{R}^C$, $\beta \in \mathbb{R}^C$:
一个 batch 的 sequence embeddings 输入 $X \in \mathbb{R}^{B \times C \times L}$, $\gamma \in \mathbb{R}^C$, $\beta \in \mathbb{R}^C$:
一个 batch 的 embeddings 输入 $X \in \mathbb{R}^{B \times C}$, $\gamma \in \mathbb{R}^C$, $\beta \in \mathbb{R}^C$:
因为 BN 在 2D 图像处理中比较常用,所以看一下 PyTorch 中的 torch.nn.BatchNorm2d:
1 | torch.nn.BatchNorm2d(num_features, |
num_features: 通道数eps: 防止零除affine: 是否 scale and shift,这两个参数 $\gamma$ 和 $\beta$ 是可学习的参数,在代码中应该用nn.Parameter包裹这两个 Tensor1
2
3
4# init
if self.affine:
self.scale = nn.Parameter(torch.ones(channels))
self.shift = nn.Parameter(torch.zeros(channels))momentum: 计算running_mean和running_var,用于推理的时候使用,running_mean和running_var不应该参与梯度计算,所以应该加入buffer中track_running_stats: 是否计算running_mean和running_var,默认是计算的。如果设置为False,则在推理的时候也当场计算参与推理的 batch 的 mean 和 var1
2
3
4
5
6
7
8
9# init
if self.track_running_stats:
self.register_buffer('running_mean', torch.zeros(channels))
self.register_buffer('running_var', torch.ones(channels))
# update
if self.track_running_stats:
self.running_mean = (1 - self.momentum) * self.running_mean + self.momentum * mean
self.running_var = (1 - self.momentum) * self.running_var + self.momentum * var
自己实现简单的代码验证一下:
1 | import torch |
代码实现可以参考 labml.ai-batch_norm
2. Layer Normalization
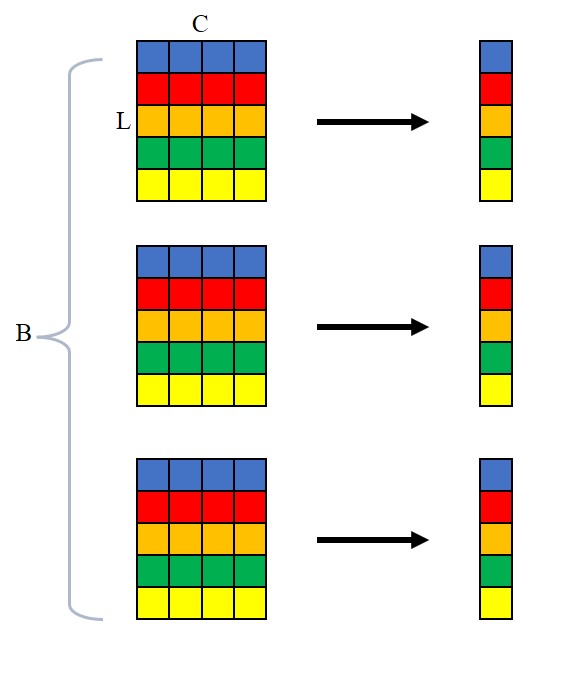
Layer Normalization 主要被用于 NLP 领域,它跟 batch size 无关,是在每个样本的 feature 上做 normalization,这里说的 feature 具体指代什么,可以根据不同的输入来决定(用 normalizaed_shape 来指定)。在 NLP 任务中,一般是将每个词的 embedding 做 normalization。这是比较符合直觉的,因为不能一个 batch 的不同 sample 之间做 normalization,同样在一个 sequence 里面做 normalization 也不行,因为一个 sequence 里会有 padding,把 padding 和其他词的 embedding 一起做 normalization 是不合理的,只能是每个词自己做 normalization。
下面是一个 3-D Tensor with shape $(B, L, C)$ 计算均值和标准差的示意图,计算得到的均值和方差的形状是 $(B,L)$,再广播成输入的形状进行计算。即有 $B$ 个句子,每个句子长度为 $L$,每个词的 embedding size 为 $C$。
同样,Layer Normalization 中也会加上 scale and shift,但与 Batch Normalization 不同,这个是 element-wise 的,也就是 scale and shift 的形状与参与 normalization 的那部分 feature 维度相同。
计算方差(或标准差)同样是有偏的
对于不同形状的输入,计算规则如下:
一个 batch 的 sequence embeddings 输入 $X \in \mathbb{R}^{B \times C \times L}$, $\gamma \in \mathbb{R}^C$, $\beta \in \mathbb{R}^C$:
一个 batch 的 embeddings 输入 $X \in \mathbb{R}^{B \times C}$, $\gamma \in \mathbb{R}^C$, $\beta \in \mathbb{R}^C$:
一个 batch 的图片输入 $X \in \mathbb{R}^{B \times C \times H \times W}$, $\gamma \in \mathbb{R}^{C \times H \times W}$, $\beta \in \mathbb{R}^{C \times H \times W}$:
PyTorch 中的 Layer Normalization 不分什么 1-D, 2-D 的,统一用 torch.nn.LayerNorm:
1 | torch.nn.LayerNorm(normalized_shape, |
normalized_shape: 参与 normalization 的那几个维度的形状,一般都是后面几个维度。normalized_shape可以是 int, list 或 torch.Tensor,如果是 int 就转成 list。比如 NLP 中一个输入序列的 shape 是(B, L, C),则normalized_shape就是C或[C],这样参与 normalization 的 dim 就是 -1.eps: 防止零除elementwise_affine: 是否 scale and shift,这两个参数 $\gamma$ 和 $\beta$ 是可学习的参数,在代码中应该用nn.Parameter包裹这两个 Tensor1
2
3if self.elementwise_affine:
self.gain = nn.Parameter(torch.ones(normalized_shape))
self.bias = nn.Parameter(torch.zeros(normalized_shape))
自己实现简单的代码验证一下:
1 | import torch |
3. Group Normalization
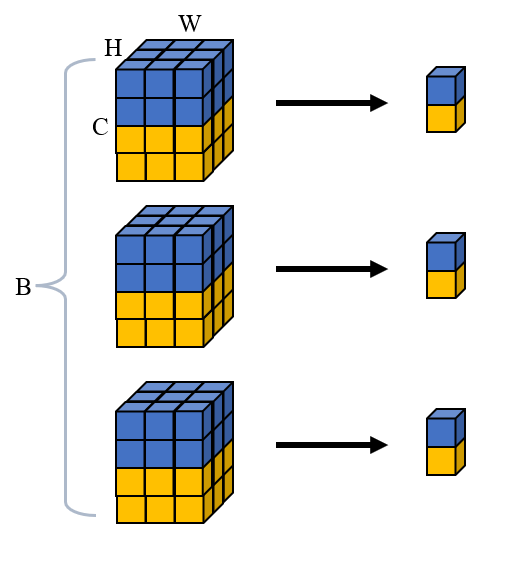
Group Normalization 主要用于图像领域,对于一个 2-D 图像,它的 Tensor 是 4-D 的,即 (B, C, H, W),Group Normalization 将 channels 分为几个 group,然后每个 group 内的所有元素做 normalization。这个操作只在单个样本上进行,不涉及 batch,所以可以用于一些 batch 比较小的场合。如果设置 group 为 1,那么 Group Normalization 就是 Layer Normalization。
Group Normalization 中的 scale and shift 是给每个通道一个参数,二者的形状是 $(C,)$
计算方差(或标准差)同样是有偏的
下面是一个 4-D Tensor with shape $(B, C, H, W)$ 计算均值和标准差的示意图,分成 $G$ 个 group,reshape 成 $(B, G, C/G, H, W)$计算得到的均值和方差的形状是 $(B, G)$,再广播成 $(B, G, C/G, H, W)$ 的形状进行计算,最后再 reshape 成输入的形状。
计算过程不好用公式表示,这里直接用代码:
1 | # x shape=(B, C, H, W) |
PyTorch 中的 torch.nn.GroupNorm 如下:
1 | torch.nn.GroupNorm(num_groups, |
这些参数没什么好讲的,见词知义,唯一需要强调一下的是 affine,涉及到 scale and shift,这两个可学习参数的是逐通道的,初始化如下:
1 | if self.affine: |
自己实现简单的代码验证一下:
1 | import torch |
4. 参考资料
- labml.ai 的代码实现
- PyTorch 文档
更新记录:
- 2022-4-9:第一版上传